
 版权声明:本文为博主原创文章,转载请注明出处:https://twocups.cn/index.php/2019/12/05/05/
版权声明:本文为博主原创文章,转载请注明出处:https://twocups.cn/index.php/2019/12/05/05/
论文题目:Energy-Efficient UAV-Enabled MEC System: Bits Allocation Optimization and Trajectory Design
作者:Linpei Li,Xiangming Wen,Zhaoming Lu,Qi Pan,Wenpeng Jing,Zhiqun Hu
论文发表于期刊 Sensors(2019年10月)
摘要: 由于具有高移动性和易于部署的优势,无人飞行器(UAV)支持下的移动边缘计算(MEC)系统因其低延迟和低传输能耗的特点而备受关注。该系统已被广泛应用于提供通信和计算服务,尤其是在物联网(IoT)中。但是,无人机支持下的MEC系统中仍然存在一些挑战。首先,无人机的持续飞行时间受到限制,这将进一步影响整个 MEC 系统的性能。其次,移动设备由电池供电,并且某些设备的电池难以更换。针对以上情况,该文研究了一种无人机支持下的 MEC 系统。该系统中的无人机具有计算能力,并且提供计算卸载的任务。在无人机的能源预算,每个任务的位数,数据的因果关系和无人机的速度等约束条件下,无人机支持下的 MEC 系统的总能耗(包括无人机的能耗和地面用户设备的能耗)需要最小化。为了最小化总能耗,该文联合优化了上传数据、计算数据、下载数据的位分配和无人机的轨迹。此外,该文提出了一种两阶段交替算法来解决非凸公式最优化的问题。最后,该文通过仿真证明了,即使在不同的设置下该方案与其他基准方案相比都具有更好的性能。
MEC的卸载模式包括二元卸载(Binary offloading)和部分卸载(Partial offloading)。在二元卸载模式下,无法对计算任务进行分区,而只能对本地计算或整个计算进行分区。在部分卸载下,一部分计算任务可以本地计算,另一部分则可以被卸载。该文仅考虑二元卸载模式来减轻用户的计算负担。
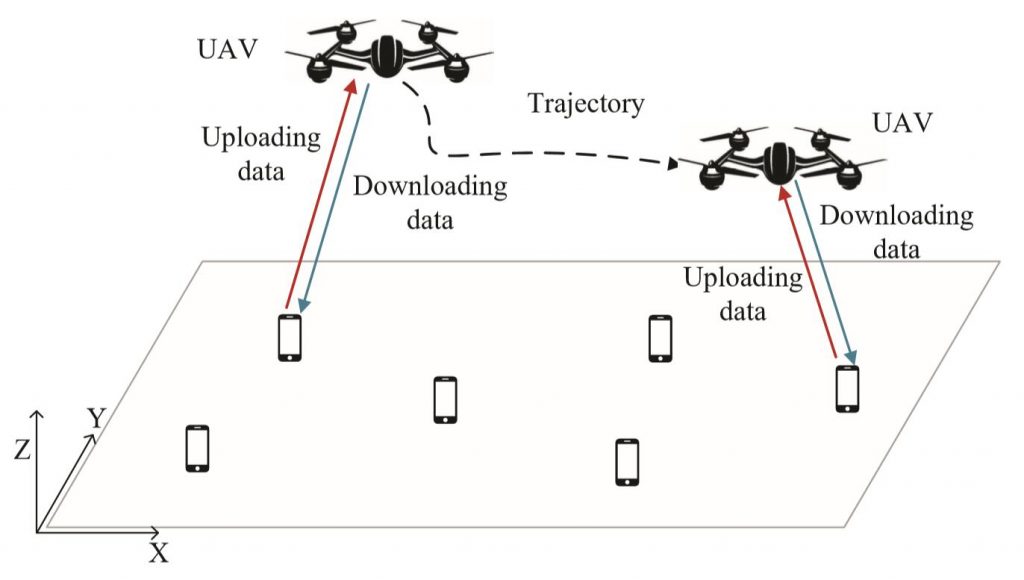
上图描绘了无人机支持下的 MEC 系统。考虑到无人机的能源约束和地面用户较短的任务期限,无人机支持下的 MEC 系统可以提供通信服务的区域并不大。因此,该文假定地面用户没有分布在大面积上,并且地面用户总是在无人机的通信范围内。
无人机支持下的 MEC 系统的能耗由两部分组成:无人机的能耗和地面用户的能耗。 因此,该系统的总能耗公式为:
在无人机支持下的 MEC 系统的二元卸载模式下,所有K个用户将其计算任务上载到无人机,而地面用户则没有本地计算任务。 因此,地面用户的能耗仅取决于上载地面用户数据的通信能耗,其公式为:
其中,B 和 σ2 分别表示接收机的通信带宽和噪声功率;I 表示第 n 个时隙中用户 k 的上传输入位数。
而无人机的能耗分为三部分:计算的能耗,飞行的能耗以及将输出结果下载到地面用户的能耗,其公式为:

能源效率问题的目标是最大程度地降低无人机支持下MEC系统的总能耗。 在数据因果关系、无人机的速度和位置关系的约束下,该文联合优化了位分配 I 和无人机的轨迹 q。由此,相应的能耗最小化问题 P1 表示为:

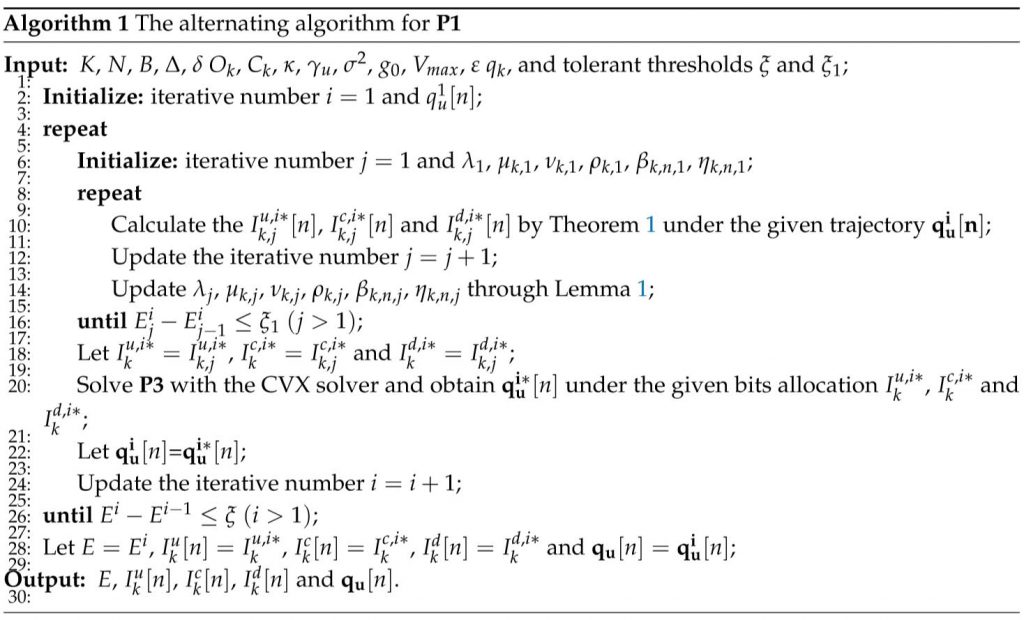
该文还提出了一种两阶段交替算法,该交替算法的详细信息显示在算法1中。其中 Eij 和 Ei 表示在每次迭代中无人机支持下MEC系统的总能耗。
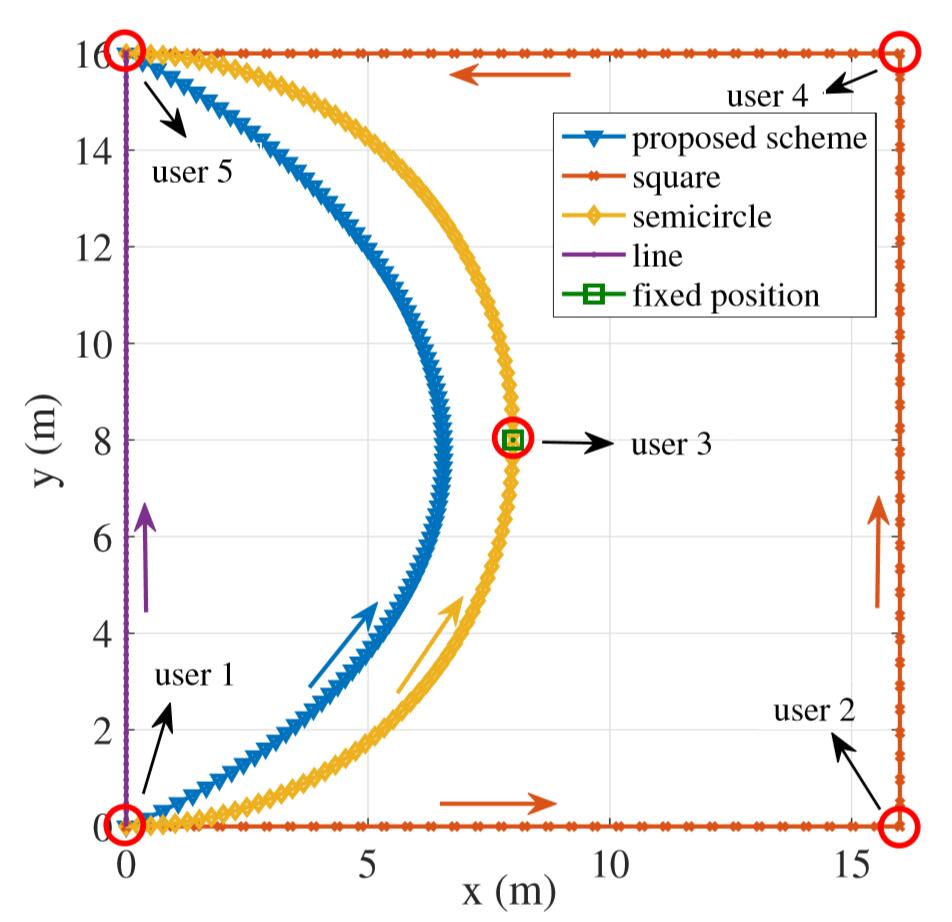
该文通过仿真评估来证明所提出算法的性能,并且考虑了无人机的五个轨迹,以比较无人机支持下 MEC 系统的能耗。假设每个用户的输入任务的大小分别为 I1 = 4×107位, I2 = 5×107位, I3 = 6×107位, I4 = 7×107位和 I5 = 8×107位。所有任务应在 T = 5s之内处理。每个时隙和子时隙的持续时间分别设置为5×10^(-2) s和10^(-2) s。每个用户的位置是 p1 = (0,0,0), p2 = (16,0,0), p3 = (8,8,0), p4 = (16,16,0)和 p5 = (0,16,0)。无人机的起始位置是 (0,0,H),最终位置是 (0,16,H)。仿真比较了五个轨迹:使用所提出的算法的轨迹,长度为16m的正方形轨迹,半径为8m的半圆,从(0,0,H)到(0,16,H)的线轨迹以及固定的点在(8,8,H)中,如下图所示。
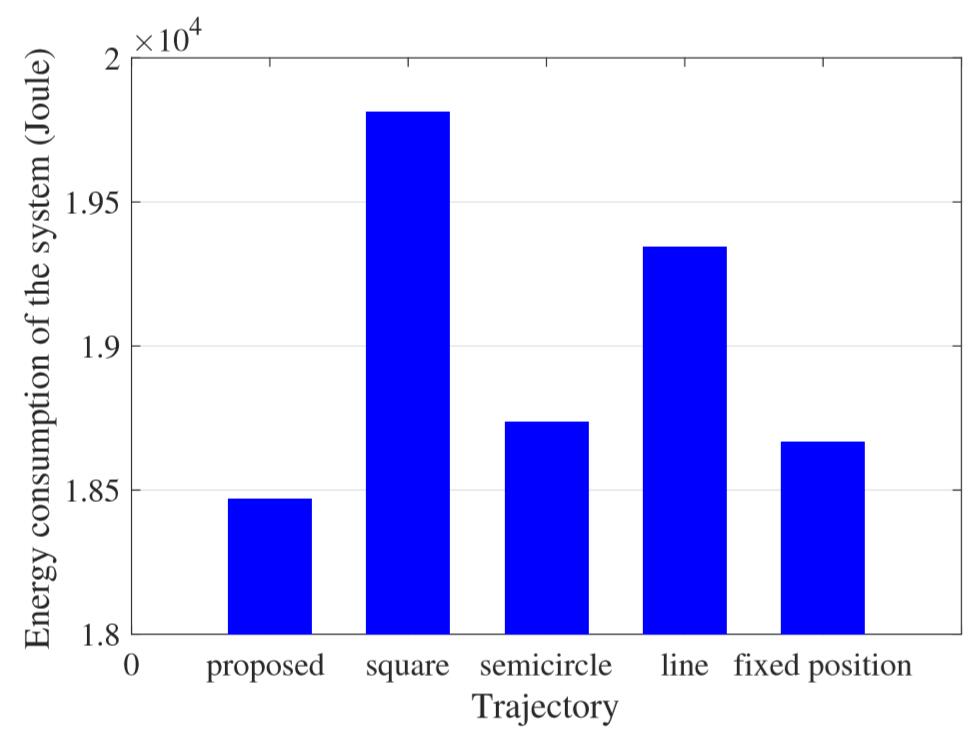
在相同的参数设置下,该文将四个预定轨迹的总能耗和所提出的两阶段交替算法 的总能耗进行了对比。在四个预先定义的轨迹中,在给定轨迹下优化了位分配。无人机支持下的MEC系统在五个轨迹下的总能耗分别为1.8468×104 J,1.9812×104 J,1.8735×104 J,1.9343×104 Jand1.8665×104 J,如下图所示。
根据仿真结果可以看出,该文所提出的两阶段交替算法更倾向于用户2、用户3和用户4,用于接收输入数据并发送输出结果。与预定义的轨迹相比,所提方案的轨迹经过了优化,以最大程度地降低了总能耗。
个人总结
首先,该文提出了一种节能高效的方案,该方案受无人机能量预算、每个任务位数、数据的因果关系以及无人机速度限制的约束。该问题的目的是使具有无人机支持下 MEC 系统的总能耗最小化,其中包括地面用户设备和无人机的能耗。其次,该文提出了一个两阶段交替算法来解决优化问题。由于非凸目标函数和非凸约束,公式化的优化问题是非凸的。最后,仿真结果表明,与其他基准方案相比,该方案具有更强的性能。并且与无人机的固定轨迹相比,该方案的能耗大大降低。
这篇论文是一篇标准的将显示问题公式化,并通过最优化方法求解的论文。其中,对无人机和 MEC 网络通信条件的约束具有很强的借鉴意义,值得我在之后的建模过程中参考。其次,该文所提出的二阶段交替算法的本质应该是通过两个迭代的嵌套来求出最优轨迹的方法,在算法的表述上也值得我学习。而最后的实验部分,我上文只提到了一个实验,其实该文中还有几种其他情况下该算法性能验证的实验。这也是一种做实验的角度,即虽然单次实验没有太多数据,但可以设置多个实验场景,施加不同的约束条件。这样既证明了自己的算法,又在实验设置上不用过于庞杂,同时实验的分量和占比又有很高的说服力。
论文下载地址: Energy-Efficient UAV-Enabled MEC System:Bits Allocation Optimization and Trajectory Design
注:论文原文由 Google 学术提供,仅供大家交流学习使用,不得用于任何形式的商业用途,请下载后24小时内删除。